Period: 15. 11. 2020 – 15. 07. 2021
Funding SOURCE: Horizon 2020
TOTAL BUDGET:
PROJECT COORDINATOR: FOKUS TECH d.o.o.
GEMMA COORDINATOR: dr. David Podgorelec
PROJECT PARTNERS:
- FOKUS TECH d.o.o., Celje, Slovenia (with UM FERI as a subcontractor),
- University of Maribor, Faculty of Electrical Engineering and Computer Science; FANUC ADRIA d.o.o.
Project website: www.safearoundrobots.com
LINKEDIN: /
Intelligent 3D safety sensor for cobot applications
Abstract:
COVR is an EU-funded H2020 project aimed to determine protocols how to test and validate safety for collaborative robot (cobot) applications or components. The protocols are being developed by third parties in series of smaller projects – COVR awards, CobotSense being one of them.
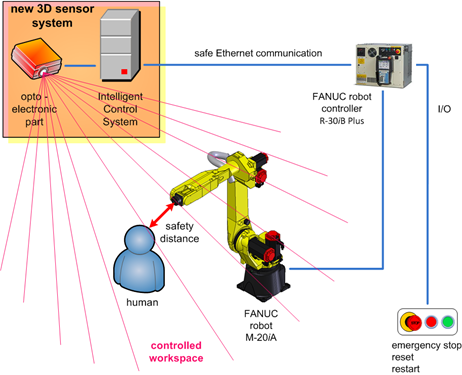
In the Factories of the Future, humans and cobots will share common workspace to enable more flexible and cost-effective production. In this new paradigm, small cobots are already a reality, but this is not the case for big robots and heavy-duty applications. New 3D safety sensors and intelligent control systems (ICS) are needed for these new cobot applications, but they are unfortunately not available on the market yet. To fill this gap, the CobotSense partners have developed such a novel laser-based 3D safety sensor with an associated ICS. The goals of CobotSense, all successfully achieved, were:
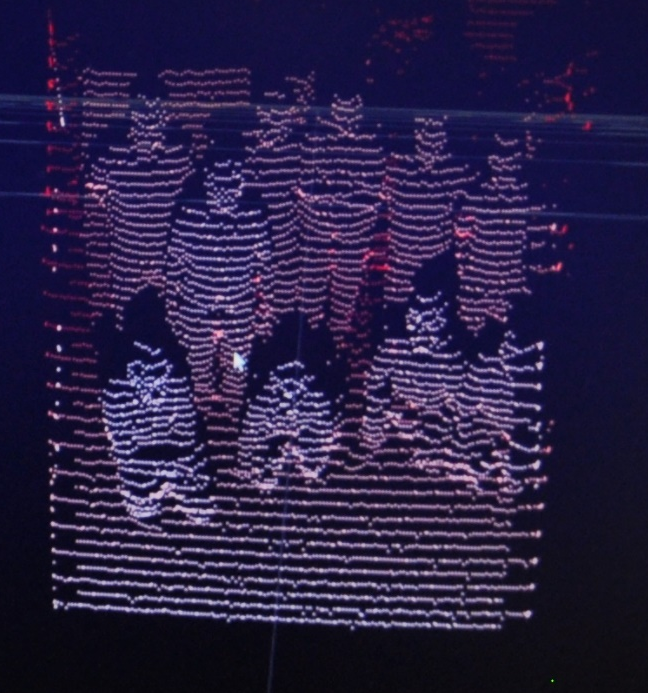
- Advances on development of the prototype 3D LiDAR sensor for cobot applications. The key performance indicator (KPI) here is reaching the scanning speed of up to 5fps.
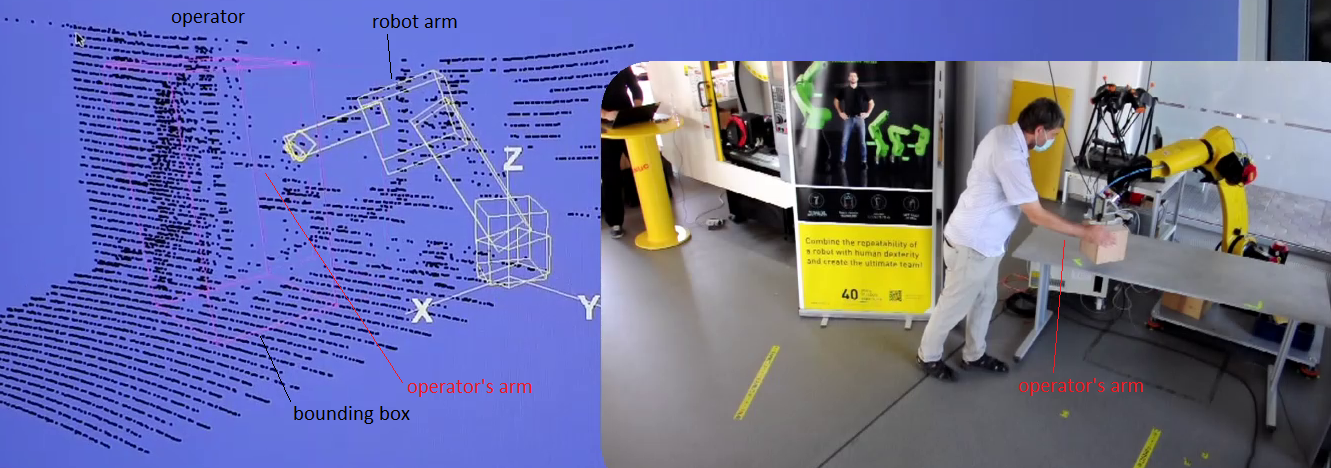
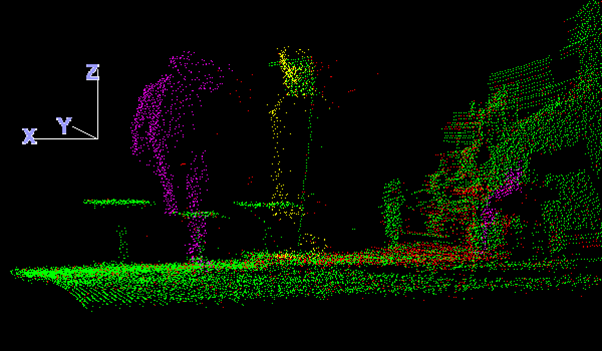
- ICS development. The KPI here is the validated safe separation distance calculation for speed and separation monitoring (SSM) cobot applications. After the first project phase (month 5), the ICS was capable of registration of the scanned point cloud and the robot’s data, determining the robot’s pose by the developed forward kinematics model, and the scene segmentation the scene into the robot, static obstacles, and operator. In the second phase (till month 9), the functionalities of motion prediction for both, robot and operator, the protective separation distance (PSD) calculation, and real-time adjustment of the robot’s speed in order to realize the speed and separation monitoring (SSM) principle, were integrated into the ICS.
- Specification of use cases for testing the integration of a robot, operator, sensor and ICS in laboratory and industrial environments. A COVR case story was described (https://youtu.be/cEMr60nl1hE), and the COVR protocol for testing SSM cobot applications monitored with 3D sensors was developed and specified.
Two UM FERI labs (Laboratory for Geospatial Modelling, Multimedia and Artificial Intelligence, and Laboratory for Cognitive Systems in Mechatronics) participated mainly in the ICS development and COVR protocol preparation.
 |  |