Methods
| Calculation of roofs solar potential from LiDAR data by multiresolution shading | |
|---|---|
|
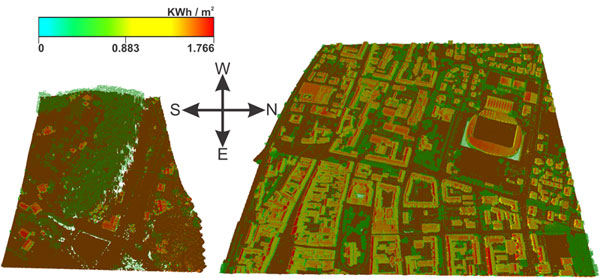
A new method has been developed for accurate spatio-temporal calclulation of solar potential of buildings' roofs using classified LiDAR data, where several factors are considered: surface topography from LiDAR point-cloud, direct and diffuse solar irradiance meassurements using pyranomter, multiresolutional shadowing from solid objects and sorrounding terrain, and heurestic shadowing from vegetation. |
| Parameter-free ground filtering of LiDAR data for automatic DTM generation | |
|
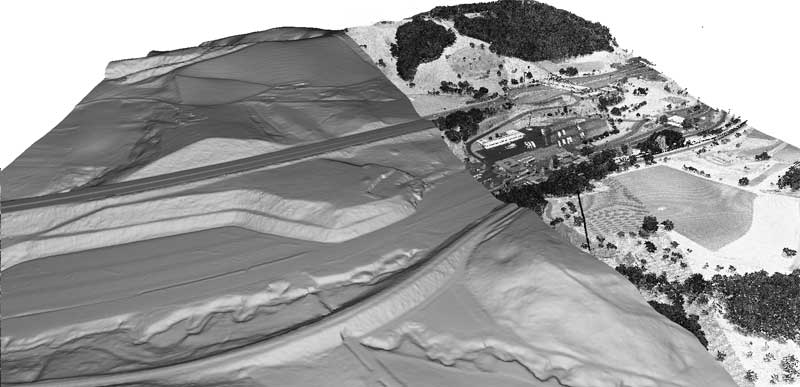
A new method has been developed that allows for parameter-free generation of a digital terrain model from LiDAR data. This method uses an adaptive morphological filter, where the size of the structural element is defined by the distance of a point from it’s nearest edge. The proposed method is capable of accurately estimating the terrain under the great majority of particularly hard circumstances exposed by the ISPRS benchmark dataset. |
| Efficient visualization of LIDAR datasets | |
|
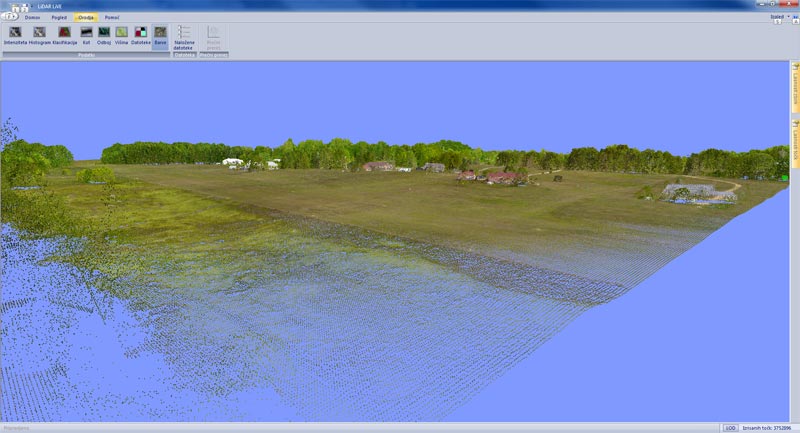
A fully interactive system allowing high frame-rate visualization is presented. The efficiency is achieved by reduction of the graphic workload based on spatial subdivision using a quad-tree. Such subdivision allows effective control of level-of-detail (LOD) by minimizing the number of calculations, needed for the visualization in real-time. |
| Efficient method for lossless LIDAR data compression | |
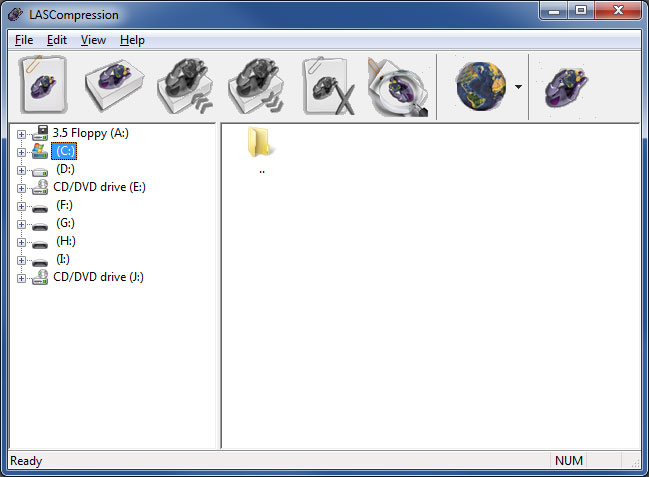 |
The metod allows for efficient compression of LAS files. The method applies three consequent steps: a predictive coding, a variable-length coding and an arithmetic coding. The method has been compared with the popular general-purpose methods and with a method developed specially for compressing LAS files. The proposed method turns out to be the most efficient in all test cases. On average, the LAS file is losslessly compressed to 12% of its original size. |
| Point-based rendering | |

|
Close-up views of LiDAR point sets are problematic when using simple pixels to visualize the data (gaps between points). On the other hand, if triangular meshes are used, artifacts may appear around scattered data and noise. Using programmable shaders, advanced point primitives in the form of locally-fitted oriented ellipses can produce a high quality rendering of both continuous surfaces and scattered data. You can test point-based rendering of web-stored data with our experimental program MaGeViz. Currently it is available only for Linux (a binary built on Ubuntu). Please read the included "Readme.txt" for instructions. |
| Web-based data structure | |
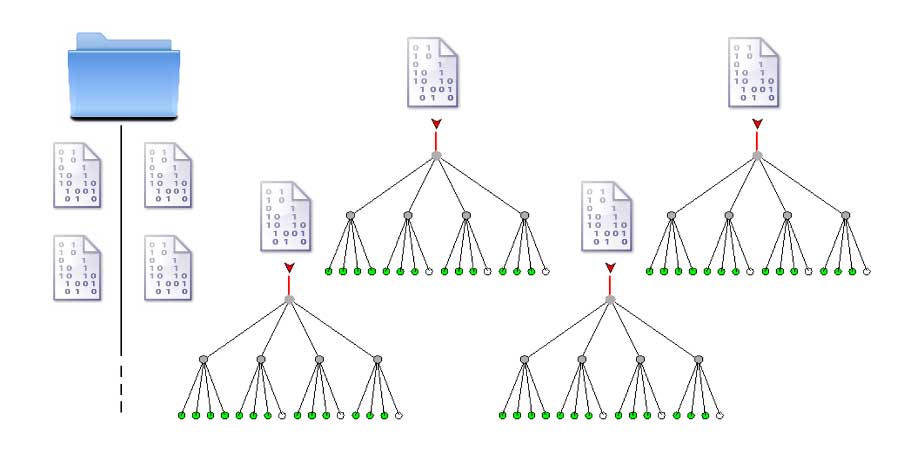
|
With typical broadband Internet connections already offering speeds above 10 Mbps, remote storage and visualization is becoming a reasonable option for LiDAR use. Our adapted data structure offers quick retrieval of LiDAR points by range and level-of-detail. In addition to usual LiDAR data, point normals can also be retrieved for advanced lighting. All data can be sent compressed or in raw LAS format. |
| Hardware LIDAR data compression | |

|
The amount of collected LIDAR data is vast and requires huge storage space as well as substantial processing effort. Data compression efficiently reduces the problems but it also introduces additional load to the processing unit and consequently increases processing time. In order to tackle the problem we developed a FPGA-based hardware LIDAR compressor based on the LAScompression algorithm. The hardware compressor exploits parallelisms in the method and the compression is 250 times faster than the software variant. |
| LiDAR point density estimation | |
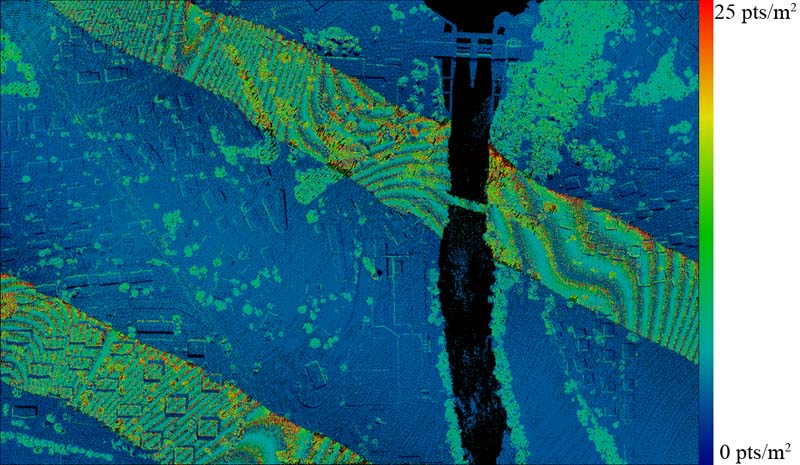
|
Point density of airborne LiDAR scans presents an important factor for evaluating their quality. The method applies Voronoi diagrams constructed on LiDAR points. Point density is measured for each individual point through inverse areas of their Voronoi cells. This approach allows for a very precise observation of variations in point density throughout the whole scan. By omitting terrain parts that cannot be properly scanned, such as water bodies, the method provides a more precise representation of LiDAR point density. |